模拟动态环境中路径规划的时态势函数方法
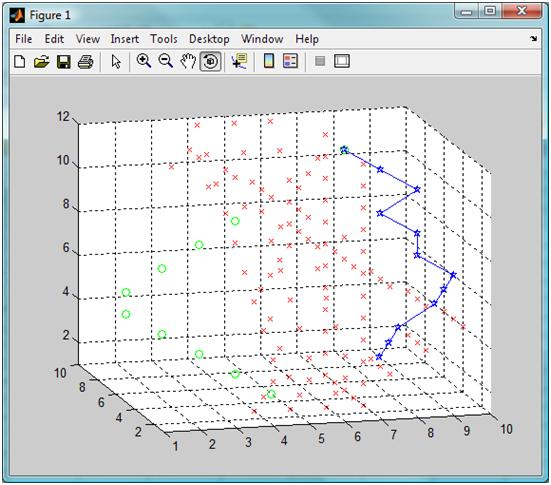
动态环境是指障碍物或目标或两者同时运动的环境。在当前的大多数研究中,试图在动态环境中导航的机器人都使用反应系统。尽管反应式系统具有执行速度快和开销少的优点,但在路径最佳化方面还是要在性能上进行权衡。通常,机器人最终会跟踪目标,从而遵循目标所走的路径,并且偏离该策略只是为了避免与它可能遇到的障碍发生碰撞。在路径规划器中,从起点到目标的路径是在机器人出发之前计算的。如果目标或障碍改变位置,则必须重新计算该路径。在动态环境中,这种情况经常发生。一种补偿方法是在规划路径时考虑目标速度和障碍物的速度。因此,机器人无需遵循目标,而是可以估算出达到目标的最佳位置,并规划到达该位置的路径。在此程序包中,我们模拟了一种在动态环境中进行路径规划的方法。该方法使用电位函数方法,该方法在计算电位值时将时间视为变量。特定位置和时间的潜在值表示机器人与障碍物发生碰撞的概率,假设该机器人从该位置开始执行随机行走。机器人通过使用当前速度外推对象的运动并计算直至预见极限的电位值来规划路径,该潜力值是通过使用连通性评估计算最小路径长度然后确定扩大预见极限的效用来确定的超过最小路径长度。该方法速度很快,因此如果初始条件在执行时发生更改,则可以以很少的开销重新规划路径。
代码获取请阅读全文
未经允许不得转载!动态环境中基于时势函数的路径规划器