凡两构件直接接触,而又相互连接的都叫运动副。
(2)判断题面接触的运动副称为低副。
(3)单选题机构具有确定运动的条件是_______________。
A 自由度数目>原动件数目
B 自由度数目<原动件数目
C 自由度数目= 原动件数目
D 前三个全不是
(4)单选题所谓运动副是指_____________________。
A 两构件通过接触构成的可动连接
B 两构件通过非接触构成的可动连接
C 两构件接触下构成的连接
D 两构件非接触下构成的连接
(5)单选题低副的特点:由于是_____摩擦,摩擦损失_____,效率_____。
A 滚动、大、高
B 滑动、大、低
C 滚动、小、低
D 滑动、小、高
(6)单选题两个构件在多处接触构成移动副,各接触处两构件相对移动的方向 时,将引入虚约束。
A 相同
B 不重叠
C 相反
D 交叉
(7)单选题上图中运动机构中箭头所示的为原动件。求该机构的自由度
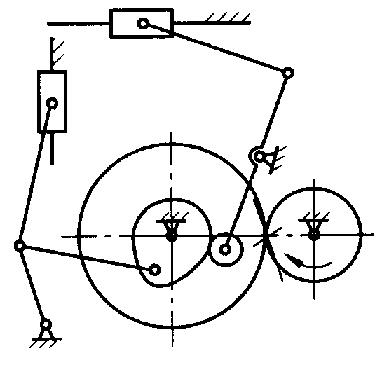
A 0
B 1
C 2
D 3
(8)填空题在平面机构中,两个构件都自由时有__[填空1]__个自由度;当两个构件通过面接触形成运动副时有__[填空2]__个自由度。
(9)填空题下图中运动机构中箭头所示的为原动件。
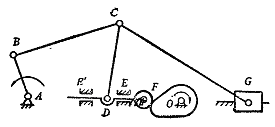
题图机构中有_[填空1]_个局部自由度。
题图机构中有_[填空2]_个虚约束。
题图机构中有_[填空3]_个复合铰链。
考虑以上各项后,图中机构有_[填空4]_个活动构件。
考虑以上各项后,图中机构有_[填空5]_个低副。
考虑以上各项后,图中机构有_[填空6]_ 个高副。
考虑以上各项后,最终可求得图中机构的自由度数为:_[填空7]_
获取标准答案请阅读全文
未经允许不得转载!第2章 平面机构的运动简图及自由度--习题【含答案】 机械设计基础